25年电赛总结
25电赛,昨天结束了,我的实验室生涯也结束了。最后一舞还是没有做到。
你要说遗憾吗,那多少肯定是有的,参加过两届电赛,国奖还是没摸到。
但其实也没有什么好可惜的,这十几天的备赛,做题,也让我获益良多,看到了之前很多没有看到的东西,对控制的理解也更深一层。
我认为这段经历是值得的,不管是从学习控制,还是认识自己上
之前感觉控制,就是输入输出,再带一个反馈,当时对这些感觉都是很抽象的,就像是理所应当的那样。
对控制的理解不到位,也给今年的国赛控制题埋下了伏笔,其实很早之前就有这个问题了,比如23年的激光打靶,或者是倒立摆,这些强控制题,我做的都很差。
对于这种需要分析系统,调整控制策略方法的题,我都很不擅长。之前做的好的题都是一些弱控制,重流程的题,比如24年的三子棋,21年的送药小车这种只需要扣逻辑,写过程的题。
而且对于这种流程问题,现在AI语言模型已经比较成熟了,用中文写代码完全不是问题。说是写代码,其实大部分时间都是在调试,debug,毕竟这部分工作ai是没办法帮你做的。
他们也做不到分析系统,控制系统。这其实也是控制的两个方向,一个过程控制,一个运动控制。而我认为的控制,其实是在后者的。
今年到最后,所有的控制过程其实都分析的很透彻了,用陀螺仪去补偿掉小车的转弯角度误差,用编码器控制位置消除掉小车运动轨迹带来的误差,最后用位置增量累加控制步进电机+pid实现闭环打靶。
只可惜时间不太够了,最后这三个值累加到一块的现象总是不太理想,也没有什么头绪,赛后才后知后觉,驱动电机的方式可能不太对。驱动电机策略上的失误,使得其性能本来就不足以完成闭环打靶,最后怎么调也出不来现象。
临门一脚,就是差在了这个地方。
最后时间很紧张,运动函数又是最底层的东西。最后也是没考虑好,有时候只差一点,放在其他地方就是差很多啊。
这次电赛让我看到了自己对控制的不足,也亲身感受到了控制的魅力。要学会如何去分析系统,理解其内部运作的过程,进而施加控制手段,最终达成控制目标的目的。
系统的阶数,响应,反馈,误差分析,用什么控制手段,在哪用怎么用。这些都是需要经验,需要理解的。
虽然我对控制做的不是很好,但是我觉得我可以做出更多更好的努力,争取在控制领域做出一点属于自己的成果,这可能是我接下来,或者说近几年,年轻时候的目标吧。
这次电赛,也有很多研0的学长跟我们站在一眼,对我们的电赛指导做出了不可磨灭的贡献,不为什么,就是热爱,单纯冲着这份情感,实验室的传承精神,
从开赛前的准备阶段,再到开赛时候的比赛阶段,最终比赛时候的后勤工作,都有学长的无私奉献,真的是感受到了实验室大家庭的温暖,太奉献了,这份感动是我无以言表的,我会永远记住这份情感,并带着它传承下去。

姚老师还在计算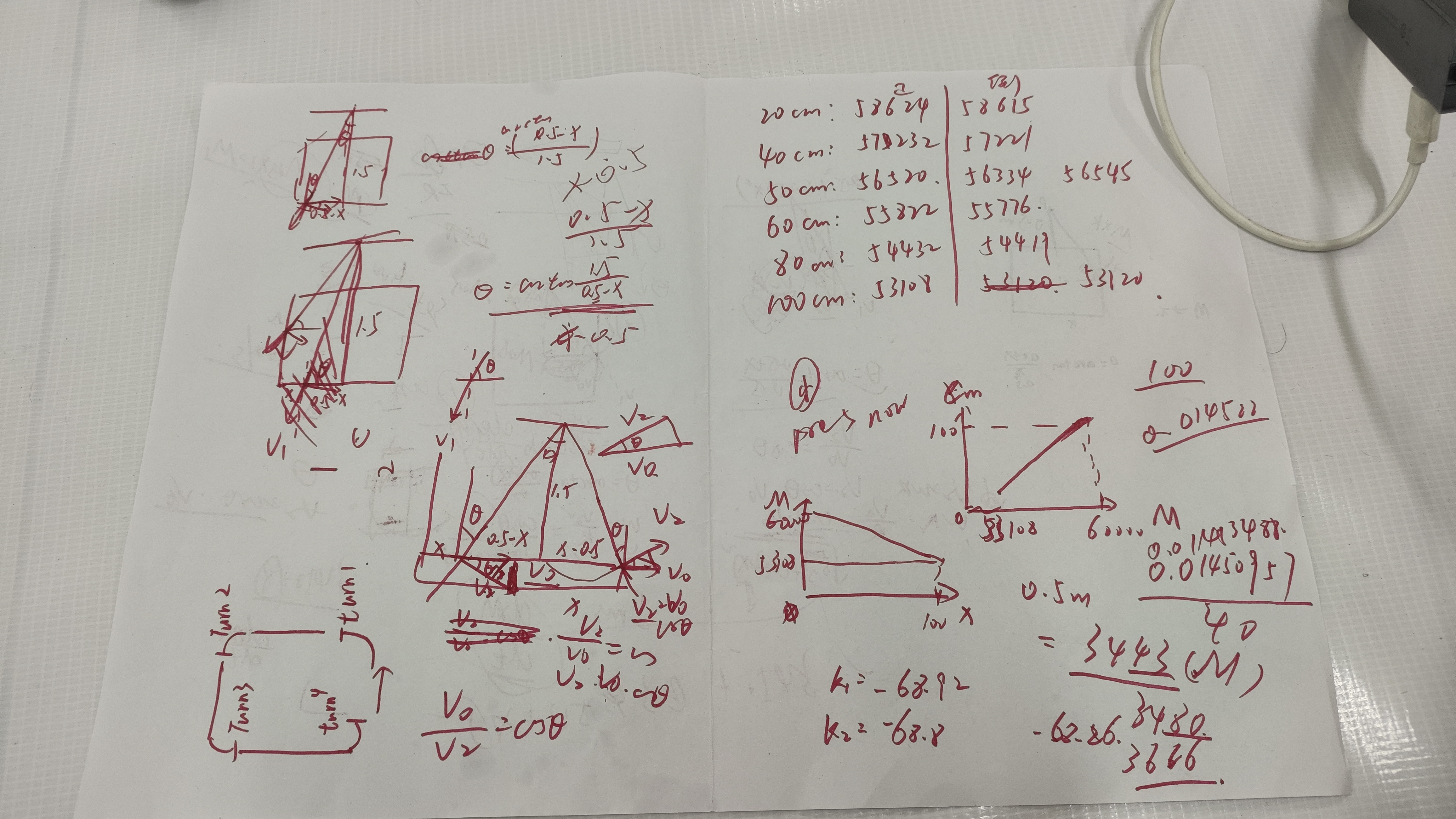
不灭钻石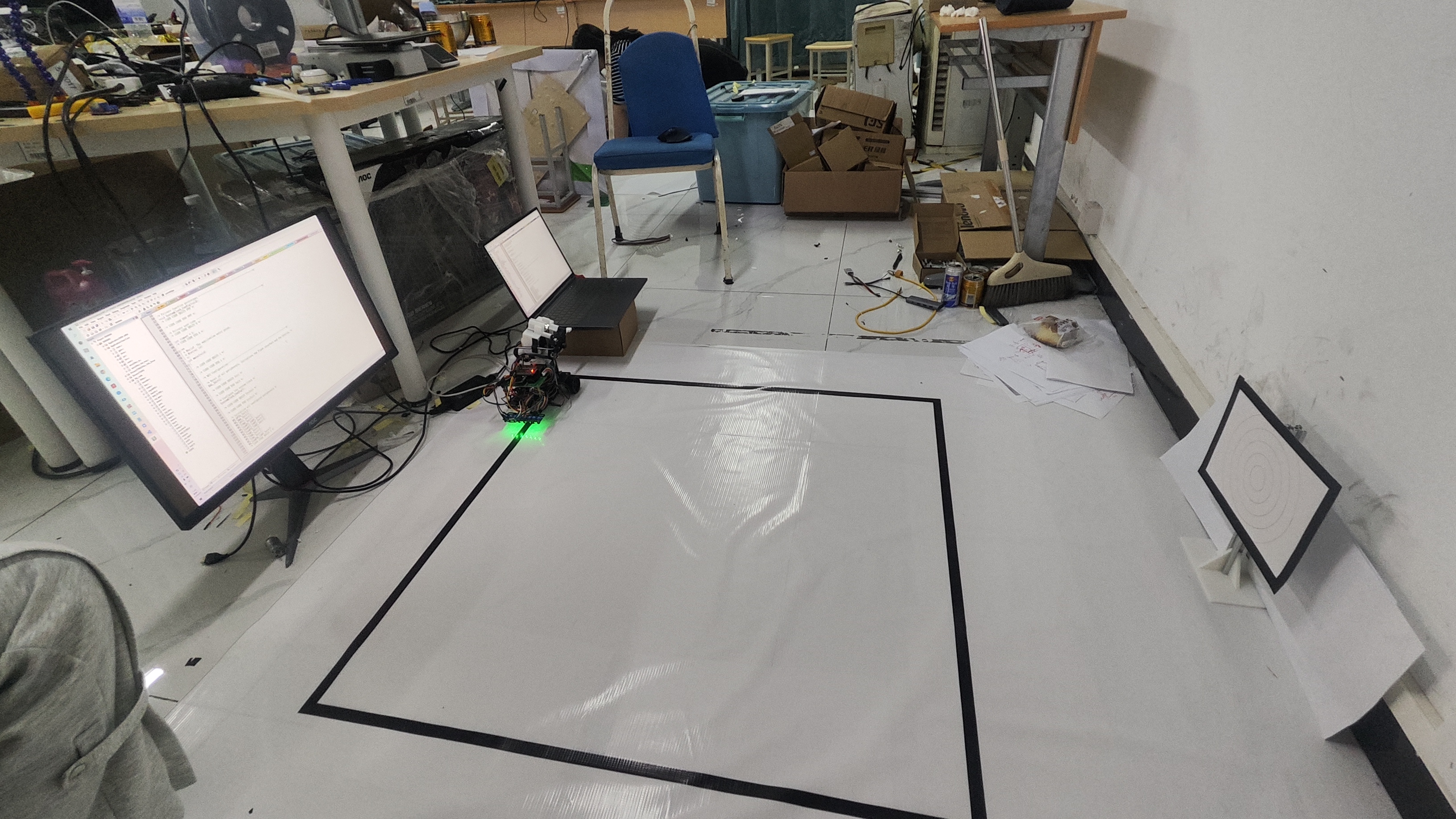
最后还有两小只的无敌作画